TEMA BROJA - ROBOTIKA
Pripremio: Dragan Lazarević
Opipavanje svemira
U vasioni umesto ljudi
Od prvih letova u kosmos postavljalo se pitanje: da li slati ljude ili automate? Prvi sateliti i prve kosmičke sonde,legendarni „sputnjici“ i „lunjici“ bili su automati koji su, tehnikom od pre više od pola veka, uspešno obavljali radnje za koje su bili izrađeni. I prve kosmičke letelice sa ljudskom posadom, “vostok“ i „merkjuri“ mogle su da obave let bez čoveka, ali je cilj bio da putem kosmičkog prostranstva krenu i ljudi.
 Posle uspešno obavljenih letova na Mesec sa ljudskim posadama u okviru programa „Apolo“ (tri misije obletanja Meseca, šest misija sa spuštanjem na njegovu površinu 1968-1972), letovi astronauta su se ograničili na Zemljinu orbitu i boravak na orbitalnim stanicama a kosmičke letelice bez posade su dobile glavnu ulogu u istraživanju planeta i ostalih tela Sunčevog sistema. Posle uspešno obavljenih letova na Mesec sa ljudskim posadama u okviru programa „Apolo“ (tri misije obletanja Meseca, šest misija sa spuštanjem na njegovu površinu 1968-1972), letovi astronauta su se ograničili na Zemljinu orbitu i boravak na orbitalnim stanicama a kosmičke letelice bez posade su dobile glavnu ulogu u istraživanju planeta i ostalih tela Sunčevog sistema.
Razvoj elektronike i kibernetike je doveo do stvaranja sve složenijih kosmičkih aparata, sposobnih da se usklade sa okolinom i situacijom u kojoj se nalaze i obave zadatke za koje su programirani tako da sa pravom mogu da se nazovu kosmičkim robotima.
Kosmičke sonde-roboti su danas na raznim putanjama širom Sunčevog sistema. Trenutno kruže oko Meseca, Merkura,Venere, Marsa, planetoida Veste, Saturna a neki su na putu ka Jupiteru , Plutonu i kometama. Uspešno su se spustili na površinu Meseca i ispitali teren za dolazak astronauta, zatim na površinu Venere, Marsa, planetoida Eros i Saturnovog satelita Titan, obavljena su sondiranja Jupiterove atmosfere, ispitan sudar sa glavom komete itd. Sve planete Sunčevog sistema su bile istražene bliskim proletanjem sondi „vojadžer 1 i 2“ koje su sada, posle putovanja dugog 35 godina, udaljene od Zemlje oko 17 milijardi km i još uvek odgovaraju na komande upućene sa naše planete! Zahvaljujući robotima-sondama, prostor u kojem ljudska tehnika dejstvuje je čitav Sunčev sistem a misije sa ljudskim posadama dalje od Zemljine orbite se odlažu za neko buduće vreme. Primat u istraživanju kosmosa preuzele su sonde-roboti.
Koliko su kosmičke sonde zaista roboti bliski robotima koje je ljudska mašta stvorila davno pre nego što je to zaista postalo tehnički moguće?
U brojnim delima naučne fantastike, jedna od ikona je za sve sposoban robot koji u svugdestižućem kosmičkom brodu (druga ikona N.F.), ili na površini neke strane planete rešava probleme koji prevazilaze ljudske mogućnosti, a ponekad pravi i nove probleme. Uglavnom je fizički superioran. Svojom hladnom logikom bolje sagledava i rešava probleme od članova posade. Njegov oblik često je zamišljen kao mehanička karikatura čoveka a u ekstremnim slučajevima je android, potpuno nalik čoveku i čak sa usađenim manje ili više ljudskim osećanjima. Takva vizija robota je daleko iznad sadašnjih dostignuća i pitanje je: da li je uopšte ostvariva i potrebna?
Kosmičke sonde, složeni automati ili roboti?
Pojam robota danas je znatno širi, odnosno manje perfekcionistički nego u vreme njegovog nastanka, u delu „R.U.R“ češkog pisca Karela Čapeka i u delima Isaka Asimova, tvorca tri čuvena zakona robotike (inače odavno prekršenih vojnom primenom postojećih robota). Pod tim pojmom danas su stotine hiljada industrijskih robota koji obavljaju razne manipulativne poslove u fabrikama svojim mehaničkim rukama, prema zadacima za koje su programirani. Ako bi se sa njima poredile kosmičke sonde, one bi bile bliže onim idealnim robotima iz naučne fantastike.
 Jedna od najsavršenijih kosmičkih sondi lansiranih do sada je Saturnov veštački satelit, tzv.orbiter, sonda „kasini“. Njene dimenzije su 6m dužina, širina 4m a masa 5,5 t, od čega je polovina namenjena gorivu za sopstvene raketne motore. Lansirana sa Zemlje 1997. ka Veneri i posle dva bliska prolaska pored nje i jednog ponovnog susreta sa Zemljom i bliskog prolaska pored Jupitera, posle puta od jedne milijarde i petstotina miliona kilometara, ušla je konačno u orbitu oko Saturna i pri tome potrošila gotovo svo gorivo. Izbacila je manju sondu „hajgens“ u atmosferu Titana i održavala vezu sa njom tokom spuštanja i rada na njegovoj površini. Potom je, kružeći oko Saturna u veoma izduženoj eliptičnoj putanji, imala bliske susrete sa Saturnovim satelitima, i to više desetina sa velikim Titanom, pri čemu je snimala radarom njegovu površinu zaklonjenu maglovitim oblacima. Obrtala se i okretala ka Titanu i koristila kao radar veliku tanjirastu antenu kojom održava vezu sa Zemljom. Jedna od najsavršenijih kosmičkih sondi lansiranih do sada je Saturnov veštački satelit, tzv.orbiter, sonda „kasini“. Njene dimenzije su 6m dužina, širina 4m a masa 5,5 t, od čega je polovina namenjena gorivu za sopstvene raketne motore. Lansirana sa Zemlje 1997. ka Veneri i posle dva bliska prolaska pored nje i jednog ponovnog susreta sa Zemljom i bliskog prolaska pored Jupitera, posle puta od jedne milijarde i petstotina miliona kilometara, ušla je konačno u orbitu oko Saturna i pri tome potrošila gotovo svo gorivo. Izbacila je manju sondu „hajgens“ u atmosferu Titana i održavala vezu sa njom tokom spuštanja i rada na njegovoj površini. Potom je, kružeći oko Saturna u veoma izduženoj eliptičnoj putanji, imala bliske susrete sa Saturnovim satelitima, i to više desetina sa velikim Titanom, pri čemu je snimala radarom njegovu površinu zaklonjenu maglovitim oblacima. Obrtala se i okretala ka Titanu i koristila kao radar veliku tanjirastu antenu kojom održava vezu sa Zemljom.
Putanja sonde se može unapred proračunati računarima i predvideti godinama u budućnost ako su poznati svi uticajni faktori - a to su mase i gravitacije Saturnovih satelita, što nije bilo potpuno sigurno pre misije „kasini“. Pri svakom bliskom prolasku pored nekog satelita, sonda menja svoju putanju mada je ponekad potrebna korekcija raketnim motorima u cilju izbegavanja sudara.
Poslovi kontrole i usklađivanja rada mogu se obaviti kompjuterima na samoj sondi jer radio-talasi sa Zemlje putuju preko jednog sata do nje u orbiti oko Saturna. Sonda „kasini“ ima autonomiju rada oko trideset dana bez primanja komande sa Zemlje, odnosno kontrolna veza uspostavlja se jednom sedmično u cilju usklađivanja merenja vremena. U nizu poslova, prvi je orijentacija i navigacija koja se obavlja senzorima za Sunce i zvezde na osnovu kojih se određuje pozicija sonde. Žiroskopski sistem daje podatke računarima za održavanje stabilnosti sonde oko tri ose i regulisanje njenog okretanja i manevrisanja paljenjem dva glavna raketna motora za veće promene putanje i šesnaest manjih motora za korekciju.
Energetski sistem sonde čine tri radio-izotopska generatora koji daju energiju za napajanje svih njenih sistema. Sistem veze sa Zemljom se obavlja preko dve male antene i jedne velike tanjiraste, prečnika 4 m, i podrazumeva da one moraju biti orijentisane ka Zemlji. Softverski sistem zaštite od greške neprekidno proverava sve sisteme na sondi i vrši kompenzaciju ako se pojavi neka nepravilnost. Memorisanje podataka koje registruju dvanaest instrumenata i njihovo odašiljanje ka Zemlji glavni je zadatak njenog kompjuterskog sistema. Opremljena je sa tri kamere za snimanje, u vidljivom, bliskom IC i bliskom ultraljubičastom delu spektra, magnetometrima, analizatorima kosmičke prašine pomoću mas-pektroskopa, senzorima za plazmu i jonizovane gasove u međuplanetarnom prostoru i Saturnovim pojasevima radijacije, radarima za snimanje Titana, drugih satelita i Saturnovog prstena, spektroskopima za analize u vidljivom, toplotnom i UV zračenju.
Koliko je obiman posao da se uskladi orijentisanje, kretanje i manevrisanje sonde, primanje informacija sa instrumenata i njihovo slanje na Zemlju, održavanje energetskog sistema sonde? Rezultat ove najveće misije među kosmičkim sondama su: saznanje da na Titanu ima jezera od tečnih ugljovodonika, da Enkeladis ima toplu unutrašnjost i da njegovi gejziri izbacuju gasove u kosmički prostor i izvanredni snimci drugih satelita i samog Saturna i njegovih prstenova. Sve što je postignuto, odiseja od Venere do Saturnovog prstena, prevazilazi zamišljene mogućnosti robota iz naučne fantastike. „Kasini“ je daleko više od pojma kosmičke sonde, može se reći da je to bespilotni kosmički brod robot. Dok bude trajala, bar do 2017, biće prava isturena prethodnica čovečanstva oko dalekog Saturna.
Marsovi roveri i orbiteri, strogo kontrolisani roboti
U odnosu na ostale planete oko kojih kruži po jedna sonda, oko Marsa kruže tri funkcionalna orbitera (ima i onih kojima je prošao radni vek): američke „MRO“ i „mars odisej 2001“ i evropska „mars ekspres“, lansirana ruskom raketom. Rezultat njihovih aktivnosti je da je Mars najistraženija planeta Sunčevog sistema, da je obavljeno potpuno snimanje i mapiranje planete u vidljivom i IC delu spektra, da je radarima obavljeno skeniranje slojeva duboko ispod površine planete. Snimljeni su i Marsovi sateliti Fobos i Deimos.
„Mars ekspres“ kruži oko Marsa po vrlo izduženoj eliptičnoj putanji, pri čemu prolaskom pored Fobosa obavlja i radarsko snimanje. „MRO“ je komplikovanim manevrima kočenja, uzastopnim zalaženjima u Marsovu jonosferu (tzv. aerobraking) i paljenjem raketnih motora ušao u nisku polarnu orbitu oko planete, što je rezultat uspešnog rada njegovog računarskog sistema. Preko njega ide i veza sa roverima na površini, sada već legendarnim „spiritom“ i „oportjunitijem“. Ta dva vozila napravila su prekretnicu u istraživanju „crvene planete“; trajanje nihovih misija je godinama produžavano i, umesto planiranih 90 dana, „spirit“ je radio 6 godina a „oportjuniti“ je još uvek aktivan. Složena procedura spuštanja sa ulaskom u Marsovu atmosferu pravo sa međuplanetarne putanje, pa faza aerokočenja, odbacivanja toplotnog štita, otvaranja padobrana, paljenja retroraketa za završno kočenje, naduvavanje vazdušnih jastuka za amortizaciju udara o tlo i, konačno, zaustavljanje savšeno su obavljeni zahvaljujući usklađenom radu svih sistema kompjutera i senzora u vremenskom periodu od nekoliko minuta!
Postavljanje sletnog dela tako da rover bude u normalnom položaju i silazak sa platforme na Marsovo tle prošli su kako je planirano. Na svojim višegodišnjim putovanjima, „spirit“ po krateru Gusev a „oportjuniti“ po visoravni Meridiani Planum, ulazili su u meteoritske kratere i izlazili iz njih, penjali se na manja brda, obavljali analize stena. Na Zemlju su poslali 250.000 izvanrednih slika Marsovih predela i minerološke podatke na osnovu kojih je zaključeno da je, pre nekoliko milijardi godina, Meridijani Planum bila dno plitkog mora i da je u krateru Gusev bilo jezero.
Kada se uzme u obzir da su pokretani na solarni pogon, uz pomoć litijum-jonskih akumulatora snage samo 140 W, i to samo četiri sata dnevno kada je Sunce dovoljno visoko, a da je za kretanje potrebno minimum 100 W snage, jasno je da su uvek bili na granici zastoja. Uspešno su preživeli duge periode Marsovih zima i peščane oluje i nastavljali sa radom u povoljnijim uslovima.
Sa „spiritom“ je bilo više problema, od blokiranja jednog prednjeg točka zbog čega nije mogao da savlada peščane dine do konačnog zaglavljivanja u pesku. „Oportjuniti“ je dospeo na rub velikog kratera Endevor i za sada misija teče dalje. Zasluga za ove veoma uspešne misije pripadaju timovima stručnjaka koji upravljaju roverima, jer oni rešavaju kuda će roveri da idu i šta će da rade da bi rešili probleme koji povremeno nastaju. Snimci Marsovog terena koju kamere rovera šalju na Zemlju se spajaju u 3D sliku da bi se potom pronašla najmanje rizična putanja budućeg kretanja. Podrazumeva se da rover treba da zaobilazi stene i, ako može, da izbegava peščane dine i terene sa velikim nagibom. Ta zadata putanja se potom šalje roveru koji je prima u svoju memoriju i dalje se upravlja po njoj.
Zbog kašnjenja radio-signala od 3 do 20 minuta nije moguće direktno upravljanje roverima ali ne upravljaju ni oni sami sobom već za njih „razmišljaju“ računari u komandnom centru na Zemlji. Roveri se inače kreću veoma sporo - maksimalna brzina po ravnom čvrstom terenu je 5 cm/s, a prosečna 1 cm/s, tj. 36 m/h na čas, a program za izbegavanje rizika zaustavlja ih svakih 10 sekundi, uz 20 sekundi pauze za osmatranje i analizu okolnog terena, pri čemu postoji mogućnost da se zaustavi zadato kretanje ako se naiđe na neke teškoće. Tako se „oportjuniti“ približio strmoj ivici kratera Viktorija i polako vratio nazad. Tek 2010. stručni tim za upravljanje „oportjunitijem“ je slanjem novog programa veštačke intiligencije dao veći stepen samostalnosti pa rover može da odluči gde će da stane i koje će stene da analizira. Očigledno je da im se daje sloboda odlučivanja samo tamo gde ne može da dođe do nekog problema.
Ka Marsu je nedavno lansiran novi, šest puta veći rover „kjurioziti“ koji treba da se spusti ovog leta. Na njemu je nuklearni izvor energije tako da neće imati ograničenja koja su imali njegovi prethodnici - imaće energije za 14 godina rada. Njegov zadatak je složen: treba da se popenje na planinu visoku 5 km u krateru Gale i istraži sedimente za koje se veruje da mogu da daju odgovore o Marsovoj prošlosti. Iako se neće kretati mnogo brže od prethodnika, moći će da to obavlja u neprekidnom režimu, što bi trebalo da omogući veću i slobodniju primenu veštačke intiligencije.
Robotska mehanička ruka „canadarm2“
Međunarodna orbitalna stanica (ISS) se sastoji od preko deset modula stambene namene i desetak energetskih i naučno-tehnoloških odseka tzv. trusova. Svi moduli koji su dopremljeni spejs-šatlovima - američkim, evropskim, japanskim i ruskim - izvučeni su iz prtljažnog prostora šatla i prisajedinjeni orbitalnoj stanici robotskom rukom kanadske proizvodnje „canadarm2“. Njome su obavljana i premeštanje modula na druga mesta spajanja i asistencija pri spajanju samih šatlova sa ISS. Uz njenu pomoć se vrši snavdevanje, održavanje instrumenata i tereta oko stanice, pomažu se astronauti pri radovima u kosmičkom prostoru van stanice.
 Sama ruka je deo MSS mobilnog servisnog sistema ISS, i naslednik je manje i jednostavnije mehaničke ruke koja se koristila na spejs-šatlovima. Donesena je na ISS početkom projekta 2001. godine, pri misiji šatla „sts 100“. Pri potunoj opruženosti, duga je 17,6 m, ima masu 1,8 t, prečnik van zglobova od 0,3 m, ima sedam elekromotorizovanih zglobova, od kojih šest imaju neograničenu rotaciju. Na oba njena kraja su LEE sklopovi za zahvatanje i spajanje sa PDGF posebnim ispustima na orbitalnoj stanici i teretima preko kojih može da se snabdeva električnom energijom i ostvari prenos podataka i video-signala. Može da manipuliše teretom maksimalne mase 116 t, što je obavljano pri spajanju šatla sa stanicom. Sama ruka je deo MSS mobilnog servisnog sistema ISS, i naslednik je manje i jednostavnije mehaničke ruke koja se koristila na spejs-šatlovima. Donesena je na ISS početkom projekta 2001. godine, pri misiji šatla „sts 100“. Pri potunoj opruženosti, duga je 17,6 m, ima masu 1,8 t, prečnik van zglobova od 0,3 m, ima sedam elekromotorizovanih zglobova, od kojih šest imaju neograničenu rotaciju. Na oba njena kraja su LEE sklopovi za zahvatanje i spajanje sa PDGF posebnim ispustima na orbitalnoj stanici i teretima preko kojih može da se snabdeva električnom energijom i ostvari prenos podataka i video-signala. Može da manipuliše teretom maksimalne mase 116 t, što je obavljano pri spajanju šatla sa stanicom.
Njome se upravlja iz robotske radne stanice RWS, iz modula „destini“ ili „kupola“. Operateri posmatraju snimanje operacija kamerama na samoj ruci preko tri LCD ekrana a komande se obavljaju preko dva džojstika: jednim za translatorno pomeranje kraja ruke i drugim za rotiranje. Sistemu upravljanja se može priključiti i dodatni laptop. Računarski sistem pretvara te komande u složeno usklađeno komandovanje pojedinačnim motorima ruke. Ruka može da se kreće duž ISS samostalno, slično gusenici, zahvatajući LEE sklopovima PDGF ispuste - prvo jednim svojim krajem pa, kada se spoji drugim krajem, odvaja prvi i usmerava ga na sledeći ispust, čime radius kretanja zavisi od broja i rasporeda PGDF po orbitalnoj stanici. Drugi način kretanja je preko MBS mobilnog baznog sistema mase 1,45 t sa četiri PGDF priključna ispusta na svojim krajnjim tačkama, a MBS se nalazi na mobilnom transporteru koji klizi po šinama duž integrisanih odeljaka tzv. trusova na kojima su i solarni paneli za dobijanje struje i radijatori sistema za hlađenje ISS tako da je u zoni zahvata gotovo cela ISS osim ruskih modula.
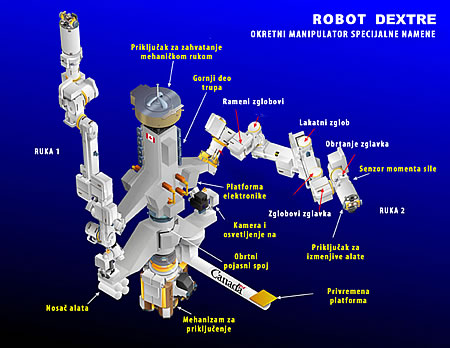
SPDM Dextre manipulator posebne namene
„Dekstri“ je robot sa dve ruke. Ne može se reći da liči na čoveka iako podražava sve motorne funcije ljudskih ruku. Namenjen je da u nekim poslovima zameni astronaute tokom rada van orbitalne stanice. Donesen je na ISS 2008. godine u misiji šatla STS123 i montiran na spoljnoj strani stanice radom astronauta koji su postavili na njegov trup dve ruke. Trup mu je dugačak 3,5 m i može da rotira oko svog pojasa.
Na jednom kraju je PDGF ispust koji može da zahvati mehanička ruka i da ga pomera duž i oko orbitalne stanice. Na drugom kraju je LEE sklop za spajanje „dekstrija“ sa PDGF ispustima na bilo kom delu ISS i blokovima za privremeno korišćenje ORU. Ima dve ruke dužine po 3,5 m, svaka ima sedam obrtnih elektromotornih zglobova a krajevi se završavaju šakama sa odgovarajućim alatima i stezačima i senzorima za radne momente sile. Na njegovom donjem delu su par tv kamera u boji i farovi za obasjavanje radnog objekta, držači raznih alata za montažu, odvrtanje navojnih spojeva itd.
Kao tetive ljudske šake
 NASA i „Dženeral motors“ rade na pronalaženju novih načina korišćenja tehnologije mikrogravitacije. Saradnja je počela na Robonautu 2, ili R2, 2007. godine, koji je 2011. postao prvi humanoidni robot u svemiru. Sada zajedno rade na robotskoj rukavici koju bi mogli da koriste astronauti i radnici u auto-industriji da bolje rade svoj posao i smanje rizik od povreda koje nastaju stresom od ponavljanja. Ovaj projekat se zove „robo-rukavica“. NASA i „Dženeral motors“ rade na pronalaženju novih načina korišćenja tehnologije mikrogravitacije. Saradnja je počela na Robonautu 2, ili R2, 2007. godine, koji je 2011. postao prvi humanoidni robot u svemiru. Sada zajedno rade na robotskoj rukavici koju bi mogli da koriste astronauti i radnici u auto-industriji da bolje rade svoj posao i smanje rizik od povreda koje nastaju stresom od ponavljanja. Ovaj projekat se zove „robo-rukavica“.
Kada su stručnjaci počeli da rade na R2, bilo je potrebno da nauče robota da koristi alat namenjen ljudima, što je dovelo do otkrića neprevaziđene spretnosti u šakama robota R2, korišćenjem najmodernijih senzora, aktuatora i tetiva koje se mogu porediti sa nervima, mišićima i tetivama ljudske šake.
Istraživanja su pokazala da stalno stiskanje alata može izazvati zamor u mišićima šake za samo par minuta, ali su prvobitna testiranja robo-rukavice pokazala da se stisak može produžiti. Na primer, astronaut koji radi u svemiru i koristi silu od 9 kg, duplo se manje napreže ako koristi robo-rukavicu.
Robo-rukavica bi našla upotrebu i na Zemlji nakon što se potpuno razvije. Ona ima mogućnost da smanji silu koju mehaničar mora da upotrebi kada koristi neka alat duže vreme ili kada se pokreti ponavljaju.
|
Može da radi samostalno ili kao deo mehaničke ruke tako da se tada može smatrati za njenu šaku iako ima i svoju šaku sa tri prsta, tzv. „sarah“. Njegova ukupna masa je 1660 kg. Posle dužeg vremena proveravanja, u upotrebu je ušao 2011. kada je, nošen mehaničkom rukom, otpakovao dva tereta sa japanskog modula za snabdevanje „kounotori 2“, i to komandama sa Zemlje dok je posada stanice spavala. Ostali sistemi za telemanipulaciju na ISS su mehanička ruka na japanskom modulu „kibo“, dva krana „strela“ na ruskim modulima a očekuje se i postavljanje evropske mehaničke ruke.
Prvi android na ISS
Konačno je lansiran u kosmos i jedan relativno čovekoliki robot, odnosno njegova polovina tela od pojasa naviše. Robonaut 2, kako ga nazivaju, ima trup, dve ruke i glavu dok će kukovi i noge biti kasnije pridodati, kada se razviju i ispitaju. Na orbitalnu stanicu je donesen poslednjom misijom šatla „diskaveri STS133“ 2011. godine. Projektovan je i razvijen na osnovu ideje da se stvori robot koji bi mogao da koristi alate namenjene astronautima i time ih zameni u dugotrajnim i zamornim poslovima montaže i održavanja spoljnih delova orbitalne stanice, odnosno da im bude neka vrsta pomoćnika pri takvim poslovima. To podrazumeva da njegove ruke budu u mehaničkom pogledu analogne čovekovim rukama, i po dimenzijama i po funkcijama. U tome se dosta uspelo.
 Robonaut je pravo čudo tehnike, a njegovi pokreti ruku, šaka i pojedinačnih prstiju gotovo da ne zaostaju za ljudskim. Njegova masa je oko 150 kg, visina od pojasa do vrha glave 1 m, svaka ruka je duga 81 cm a ukupan razmah je 240cm. Napravljen je od čelika i aluminijuma a baterije nosi na leđima. U glavi ima dve primarne i dve rezervne steroskopske kamere i dopunsku IC kameru. Za sada se ispituje unutar orbitalne stanice i uči osnovne radnje kao što su uključenje i isključenje prekidača itd. Postavljen je na nepokretnu osnovu. Nije spreman za izlazak u bezvazdušni prostor jer i njemu treba zaštitni skafander zbog velikih temperaturnih razlika dnevne i noćne strane i uticaja zračenja. Kada bude osposobljen za rad u vakuumu, komande će mu se prenositi preko senzorske rukavice a operater će 3D sliku primati iz robonautovih stereokamera. Robonaut je pravo čudo tehnike, a njegovi pokreti ruku, šaka i pojedinačnih prstiju gotovo da ne zaostaju za ljudskim. Njegova masa je oko 150 kg, visina od pojasa do vrha glave 1 m, svaka ruka je duga 81 cm a ukupan razmah je 240cm. Napravljen je od čelika i aluminijuma a baterije nosi na leđima. U glavi ima dve primarne i dve rezervne steroskopske kamere i dopunsku IC kameru. Za sada se ispituje unutar orbitalne stanice i uči osnovne radnje kao što su uključenje i isključenje prekidača itd. Postavljen je na nepokretnu osnovu. Nije spreman za izlazak u bezvazdušni prostor jer i njemu treba zaštitni skafander zbog velikih temperaturnih razlika dnevne i noćne strane i uticaja zračenja. Kada bude osposobljen za rad u vakuumu, komande će mu se prenositi preko senzorske rukavice a operater će 3D sliku primati iz robonautovih stereokamera.
Robotom će biti upravljano i glasovnim naredbama a robot će odgovarati da li je ispunio ili nije naloženu radnju. Kada se u njegovoj memoriji nakupi dovoljno iskustva, biće sposoban za autonomne zadatke. Do radnog mesta će se prenositi pričvršćen za mehaničku ruku „canadarm 2“, ali do toga neće doći još nekoliko godina.
I druge kosmičke sile planiraju da pošalju na ISS svoje androidne robote: Rusija svog SAR 400, takođe Evropa i Japan.
Roboti u bližoj kosmičkoj budućnosti
 Pod bližom budućnošću podrazumeva se period od oko jedne decenije. Pošto su mogući sasvim novi tehnološki prodori, vrlo je teško predviđati ostvarenja na duži rok. U kosmičku trku se uključuju i druge zemlje u ekonomskom usponu, tako da Kina i Indija planiraju slanje svojih robota-rovera na Mesec. Privatne kompanije iz SAD takođe imaju ambicije. Napr. Karnegi Melon institut planira slanje rovera na Mesec na osnovu iskustva sa roverima na Antarktiku i u pustinji Atakama. NASA ima velika očekivanja od robonauta; osim poslova na ISS, sa njim bi se vršilo servisiranje satelita svih namena a mogao bi da istražuje i bliže planetoide. Postavljen na odgovarajuće vozilo, mogao bi da se pošalje na Mesec ili Mars. Svojim rukama bi mogao da pregleda uzorke tla, da pred svojim kamerama okreće kamenje (što postojeći roveri ne mogu). Pod bližom budućnošću podrazumeva se period od oko jedne decenije. Pošto su mogući sasvim novi tehnološki prodori, vrlo je teško predviđati ostvarenja na duži rok. U kosmičku trku se uključuju i druge zemlje u ekonomskom usponu, tako da Kina i Indija planiraju slanje svojih robota-rovera na Mesec. Privatne kompanije iz SAD takođe imaju ambicije. Napr. Karnegi Melon institut planira slanje rovera na Mesec na osnovu iskustva sa roverima na Antarktiku i u pustinji Atakama. NASA ima velika očekivanja od robonauta; osim poslova na ISS, sa njim bi se vršilo servisiranje satelita svih namena a mogao bi da istražuje i bliže planetoide. Postavljen na odgovarajuće vozilo, mogao bi da se pošalje na Mesec ili Mars. Svojim rukama bi mogao da pregleda uzorke tla, da pred svojim kamerama okreće kamenje (što postojeći roveri ne mogu).
Eksperimenti su u toku i roboti Jet Propulsion Laboratory se ispituju u pustinjskim uslovima na terenu sličnom Marsovom. Robonaut na točkovima pod nazivom „centaur 2“ je sasvim blizu da bude prvi kandidat za lansiranje na Mesec.
Ima i drugih maštovitih projekata. Robot „athlette“ je čudna kombinacija šest nogu sa točkovima na krajevima, podešen za kretanje po vrlo neprohodnim terenima. Najatraktivniji bi bio kompletan android, robonaut sa ljudskim nogama i lokomocijom, ali taj oblik kretanja nije optimalan za terene na Mesecu ili prašnjave oblasti na Marsu.
Džonsonov svemirski centar ima projekat paukolikog robota „spidernaut“ sa osam nogu, na čiju osnovu bi bio postavljen robonaut i robot nalik na krabu „lemur 2“. Možda će se te robotske nakaze pokazati podesnijim od humanoidnih robota?
Japan planira uspostavljanje čitave robotbaze u blizini Mesečevog južnog pola 2020. Sa androidnim robotima ima veliko iskustvo (npr.višegodišnje obavljanje eksperimenata i usavršavanje robota „asimo“).
Prema svim poznatim projektima, može se očekivati da roboti znatno pre ljudi stignu na Mesec i Mars, tamo dočekaju astronaute i tako ostvare davno zamišljenu namenu da budu prethodnica i pomoćnici čoveka.
Dragan Lazarević
|





































































